
近期,英伟达CEO黄仁勋在CES2026上再次提及物理AI。简单来说,物理AI指使用运动技能理解现实世界并与之进行交互的模型,堪称连接空间智能(感知认知)与具身智能(行动躯体)的中枢神经系统,能让AI真正融入物理世界。它通常被应用于机器人、自动驾驶汽车等可自主运动的机器中。
一、物理AI的挑战:从“虚拟认知”到“物理交互”
物理AI的挑战本质是“从虚拟认知向物理交互的跨越”,这一过程呈现三层递进难点: 1. 基础层:虚拟认知的局限性——缺乏物理本质理解
传统生成式AI(如大语言模型)虽擅长虚拟环境中的抽象认知(如语言推理、图像生成),但对物理世界的底层规则(如光线折射、物体间作用力)仅停留在“统计关联”层面,无法真正“理解”。例如,模型可能通过文本学习“玻璃杯掉落会碎裂”,但无法推导不同高度、材质对结果的影响。
2. 过渡层:物理仿真的精确性——虚拟到现实的难题
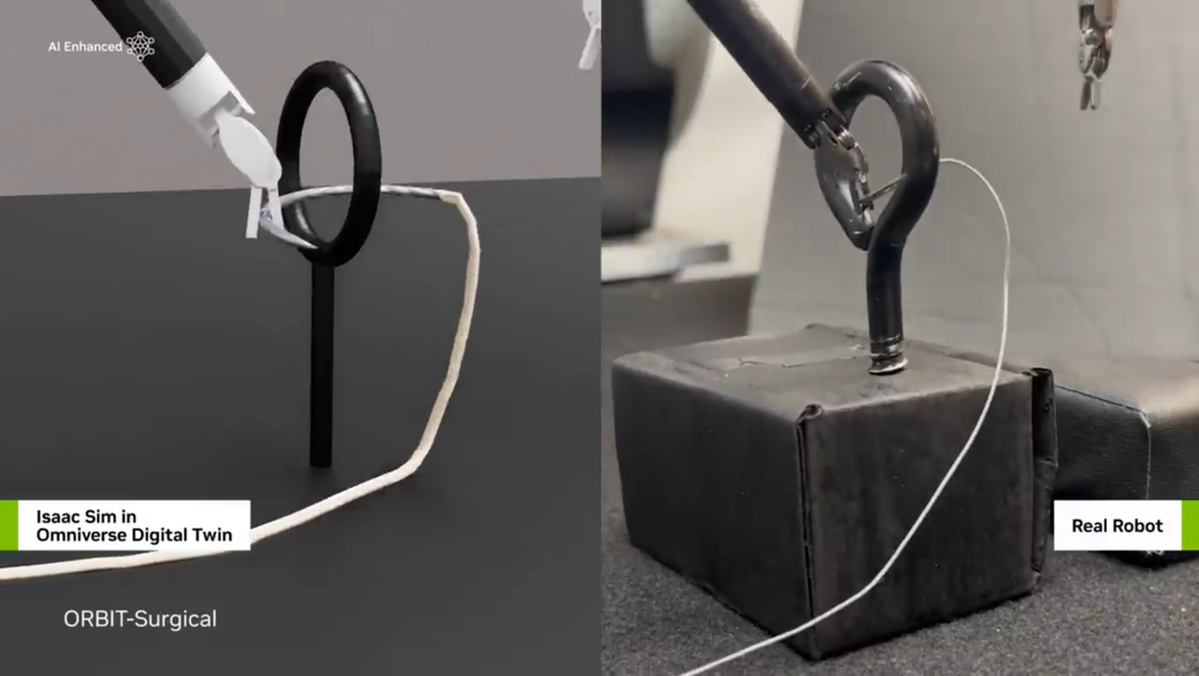
物理AI的突破需将虚拟认知升级为“物理感知”,而关键依赖是数字孪生环境的仿真质量。仿真需精确复现真实物理规则(如刚体动力学、关节约束、光线传播),否则训练出的策略在迁移时可能失效(例如仿真中忽略空气阻力,机器人实际抓取时因阻力计算偏差失败)。
3. 应用层:迁移的泛化性——从试错学习到真实适应
即使拥有高保真仿真,物理AI仍需通过强化学习在仿真中完成“数百万次试错”,将虚拟经验转化为物理技能。但真实环境充满不确定性(如物体表面磨损、光照突变),AI需具备“泛化能力”:既能利用仿真训练的基础策略,又能快速适应真实场景的细微差异。
从“虚拟认知”到“物理交互”的挑战递进,本质是AI能力从“抽象符号处理”向“物理规律驱动的行动”的跃升。其核心难点在于:既要突破虚拟认知对物理规则的本质性理解缺失,又要解决仿真环境的精确性与迁移的泛化性矛盾,最终实现AI在真实物理世界中“看得懂、动得准、适应强”的交互能力。
来源:NVIDIA
二、高质量仿真资产是物理AI训练的“桥梁”
训练有效的物理AI模型,需要仿真环境与真实世界保持高度一致。这不仅需要视觉逼真,更关键的是物理属性的准确再现——物体的质量、摩擦系数、刚度、关节约束等都直接影响仿真结果与训练效果。
衍象Synthesis平台以物理AI+数字孪生的核心理念打造的面向具身智能的仿真训练、采集及验证的全链路解决方案,平台集成了大量的Sim Ready资产、真实工程的三维建筑模型和实景重建模型,基于Multiverse数字孪生引擎和多模态大模型,可快速进行仿真场景搭建和泛化,借助自主开发的物理仿真引擎(Isaac sim、Gazebo)数据接口,可以将仿真场景直接导入不同仿真器中进行物理仿真和模拟,满足工程、制造和具身行业的Sim2Sim,Sim2Real和Real2Sim2Real的仿真、部署和验证,实现物理正确的现实世界数字孪生。
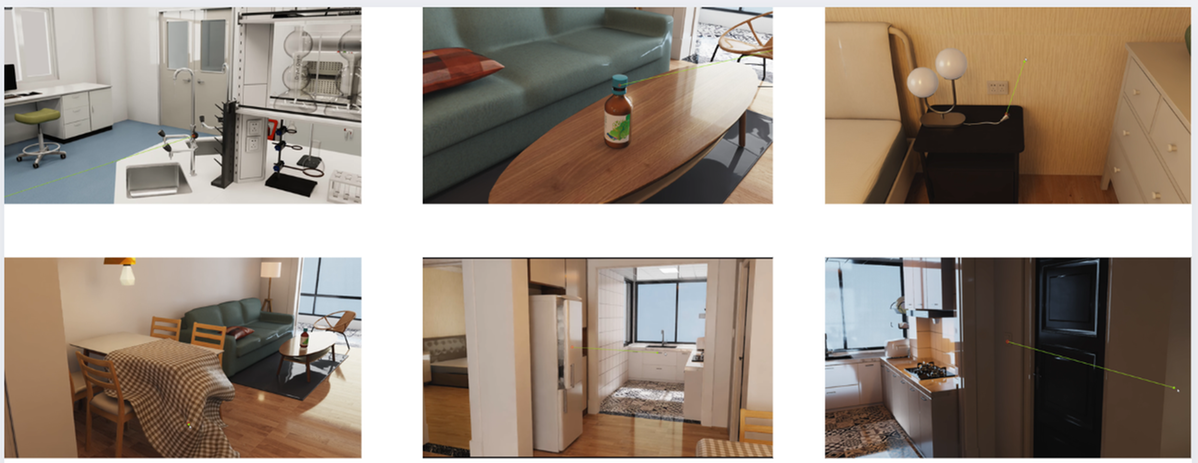
1.高质量开源Sim Ready资产库:平台内置1:1高保真实物重建资产库及实验室、手术室、家居、工厂流水线等多种仿真场景,所有资产均具备精确的几何、PBR材质与物理动力学参数,并支持格式转换与开源获取。
2.快速场景搭建与泛化:提供在线“拖拉拽”式场景编辑工具,结合基于LLM的材质、灯光、位置泛化能力,可快速构建并批量生成多样化、符合物理真实的仿真训练环境。
3.云端仿真集群与无缝加载:通过深度定制的WebRTC推流方案构建云端Isaac Sim集群,用户可通过浏览器实现远程操作与资源调度;同时提供Omniverse插件,支持在不同仿真环境中直接加载并使用平台资产与场景。
4.全流程仿真训练与数据采集:平台整合了从场景构建、物理仿真(与Isaac Sim/MuJoCo等集成)、远程遥操到云端数据采集与存储的全链路能力,旨在高效支持具身智能的Sim2Real及Real2Sim2Real算法训练与验证。
三、物理AI的行业应用
物理AI正解锁各行业的新功能:
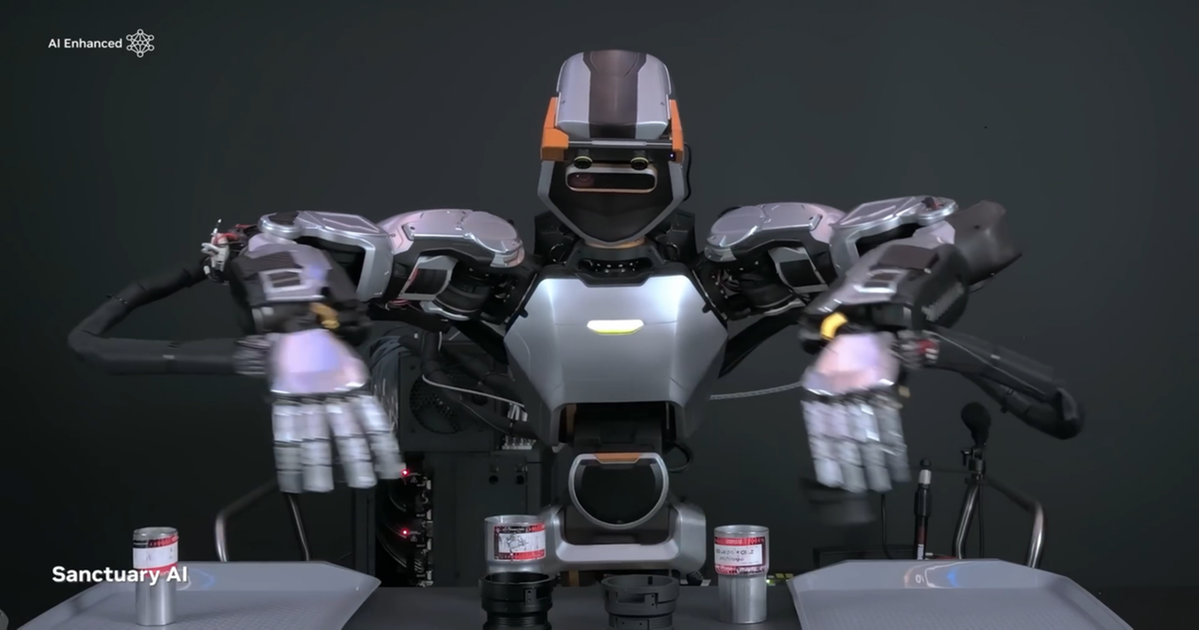
机器人:物理AI增强机器人在各类环境中的操作能力。自主移动机器人(AMR)可通过机载传感器反馈,在复杂环境中导航并避开障碍;机械手能根据物体位姿调整抓力与位置,展现精细与粗大运动技能;手术机器人可以学习穿针、缝合等复杂任务,体现物理AI的精确性与适应能力;人形机器人作为通用型机器人需具备感知、理解、导航及与物理世界交互的能力。
图片来源:NVIDIA

图片来源:NVIDIA
自动驾驶汽车(AV):AV利用传感器感知环境,在多种场景中做出决策。基于物理AI的训练使其能更准确检测行人、响应交通与天气变化、自动变道,从而灵活应对突发状况。

图片来源:NVIDIA
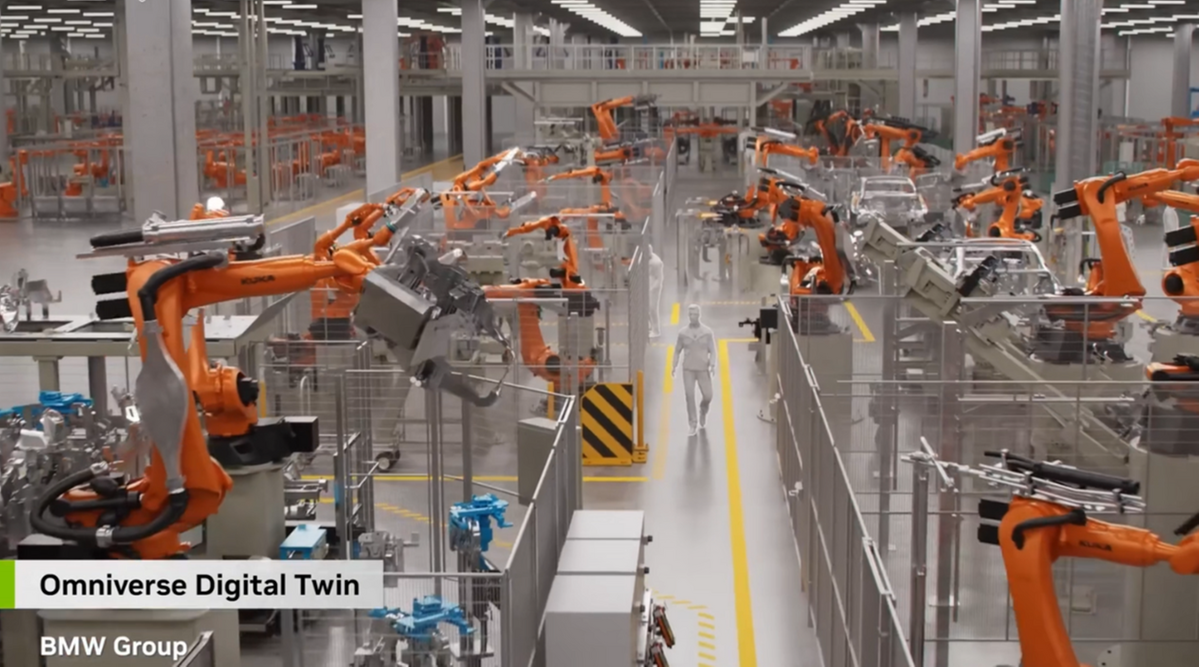
智能空间:物理AI可提升工厂、仓库等大型室内空间的功能与安全。借助固定摄像头与计算机视觉模型,团队能跟踪多种实体与活动,优化动态路线与运营效率,并通过准确感知复杂大规模环境,优先保障人身安全。
â
€‹
